


 前大灯测试仪——HLT-2000
前大灯测试仪——HLT-2000
Headlight Test---HLT-200
产 地:中国
生产公司:IYASAKA
设备名称及型号
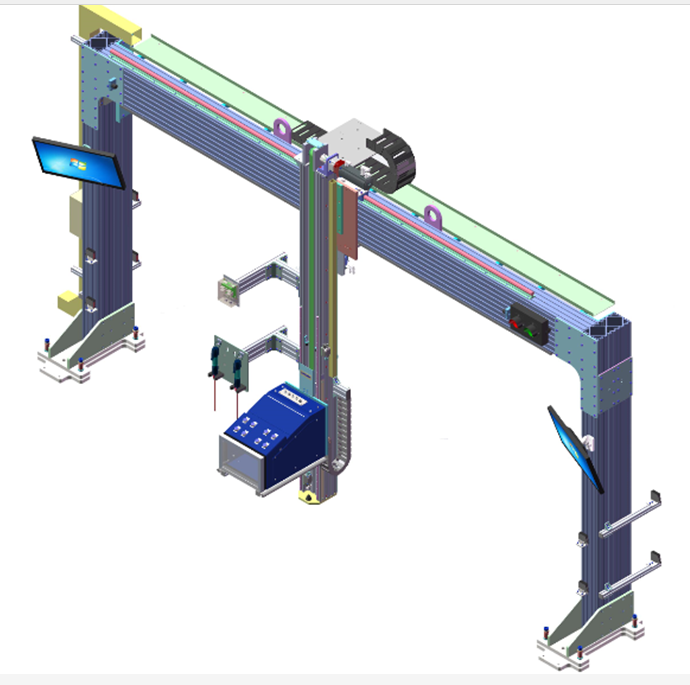
HLT-2000的前大灯测试仪包含:
- 铝龙门架式(或地轨式-商用车)
- 集光箱(含CCD摄像机、菲涅尔透镜、按钮)
- 电气控制柜(含PLC、伺服驱动器、工业电脑等)
- 灯光在线测量软件IA-HLT(用于汽车厂在线调整)
- 操作提示显示器
- 标准光源(标定用)
- 半电动电动螺丝刀(可选)
- 十米白板(可选)
- 全套技术资料,包括中英文版资料册(含电气线路图、操作手册、安装手册等)。
DLP检测原理
- DLP标定目的是消除微镜阵列的机械安装偏差和光学畸变。
- 将DLP投射标准测试图案到标定板。
- 通过伺服驱动集光箱精确对中到DLP大灯位置,
- 集光箱内数字CCD工业相机精确控制曝光参数并捕捉实际投影图像,拍摄光型图片,通过GigE协议以20~40Hz的帧率传输灯光图片到工业电脑
- 弥荣自研的灯光在线测量软件进行计算像素偏移量(X/Y轴偏差、旋转角度)。
- 通过标定算法修正DMD驱动参数,实现像素对齐(误差≤0.1像素)
DLP检测流程
- 投影模组投射出近光光型,操作人员通过车灯外部调节螺钉将拐点位置调节至近光模组标准拐点位置的垂直方向、水平方向±0.2°范围内(也可调节至垂直、水平方向±24.4mm 范围内,7米距离)
- 上位机反馈机械粗调阶段成功信号时,投影模组会切换投影。灯箱识别12个圆斑位置坐标,通过诊断信号将灯箱内部记录金样的12圆斑点阵位置,以及当前识别的12圆斑点阵位置坐标依次发送至SDK模块,等待投影模组回传投影完成信号。等待过程中包括:投影模组接收位置坐标信息,计算偏差并重新校正投影,回传投影完成信号到灯箱设备,告知计算投影完毕。
- 灯箱收到投影完成信号后,再次识别12圆斑点阵位置坐标,通过诊断信号将灯箱内部记录12圆斑点阵位置,以及当前识别12圆斑点阵位置坐标发送至投影模组,同时传递软件调节像素偏差平均精度要求值,等待投影模组回传信号。等待过程中包括:投影模组接收位置坐标信息,计算偏差并反馈校正成功或失败。
检测项目
- 左/右前大灯远光、近光、雾灯的位置偏移量;
- 左/右前大灯远光、近光、雾灯的发光强度;
- 前大灯的灯高测试;
可测光型
- 卤素灯、HID氙气灯、LED灯、矩阵大灯、DLP大灯、激光大灯和四轴灯光等
- ECE欧洲光型,SAE美国光型,JPN日本光型
- 可对应L形、Z形等常见的近光配光的检测
基本参数
| 测试高度(龙门架) | 250~1200mm |
| 测试高度(地轨式) | 300~1200mm |
| 测试距离(集光箱到车灯距离) | 300~1100mm |
| 光箱移动速度 | 水平Y:250mm/s 垂直Z:150mm/s |
范围和精度
| 测量范围和精度 | ||
| 项目 | 范围 | 精度 |
| 大灯发光强度 | 0~120,000 cd | ±5% |
光轴偏移(远/近/雾) 水平Y方向 垂直Z方向 | -500mm/10m ~ 500mm/10m -500mm/10m ~ 500mm/10m | ±1.5cm/10m 或 ±5.8’ ±1.5cm/10m 或 ±5.8’ |
| 光箱定位 | Y:-1300 ~ 1300mm Z: 300 ~ 1200mm | ±1mm ±1mm |
检测节拍
小于50秒(不需调整情况)。
Related Products



E-mail:
营业执照
网站建设:中企跨境 | SEO
中企跨境-全域组件
制作前进入CSS配置样式
在线客服添加返回顶部
右侧在线客服样式 1,2,3 1
图片alt标题设置: 弥荣(北京)交通科技有限公司
表单验证提示文本: Content cannot be empty!
循环体没有内容时: Sorry,no matching items were found.
CSS / JS 文件放置地